在“双碳”目标与危废处理规范化管理政策导向下,《“十四五”全国危险废物规范化环境管理评估工作方案》明确以强化处理设施全过程监控、减少人工直接接触、提升运维精度。作为垃圾焚烧发电行业核心设备,自动起重机受作业环境高危、结构复杂、运维难度大等因素影响,传统模式在废料处理环节存在人工巡检风险高、设备状态难感知、作业流程不透明的核心痛点,亟需数字化技术破解。
效果展示
南京福尔利携手图扑软件打造行车吊自动化改造+行车吊数字孪生系统,系统融合自动化运行、三维可视化、VR 虚拟现实、数据驱动管控能力,构建“自动运行-三维建模-VR 操作-安全防护-数据驱动-数据源采集-数据报表”全链路解决方案,打造看得见、能操作、可预警、易管理的自动化+数字化运维体系。

系统分析
01 沉浸式三维场景
画面采用科幻风格中模设计,兼顾视觉真实性与系统轻量化运行。基于固废处理车间实际场景与设备参数,完整还原墙体、楼板,及两台行车吊的双梁大车、起重小车、抓斗,同时精准复刻控制室操作台、控制按钮组、定制化操作手柄等核心要素。
- 行车吊:支持抓斗精准升降与水平移动,可切换手动控制与真实数据驱动作业模式,兼顾功能演示与真实作业展示需求。
- 操作场景:沉浸式还原行车吊控制室与控制席,控制室按真实布局建模操作台、显示屏、控制按钮组及状态指示灯,控制席配备定制化操作手柄、急停按钮及座椅,操作手感与物理控制台高度匹配。

摒弃传统三维坐标驱动方式,基于图扑 HT 引擎,通过实时数据参数控制设备动画,如行车大小车平移距离、抓斗升降高度、夹爪开闭程度等,数据实时同步自 PLC,确保虚拟动画与物理设备动作完全一致,便于分析垃圾废料抓取、转运等作业流程问题。
多角度切换查看
用户可通过鼠标实现场景缩放、旋转与漫游操作,点击正视图、俯视图、侧视图等对应视角按钮,即可快速切换观察视角,全方位掌握垃圾吊、行车吊设备的运行与作业环境状态。
应急处置可视化
系统内置危废泄漏、设备故障、火灾等典型应急场景预案库,结合三维场景实现应急可视化管控。当触发故障预警或应急信号时,图扑 HT 平台自动切换至应急模式,高亮标注故障位置、扩散范围及周边关键设备,同步推送预设处置流程至管理人员终端,为现场应急响应提供直观指引,应急过程全数据自动记录存档,满足合规追溯要求。
核心指标统计
系统支持 2D 数据面板与 3D 场景深度嵌套叠加,面板涵盖当前行车位置、抓斗实时坐标、仓容动态数据、当日投炉物料重量、破碎处理量等核心指标,通过图扑 HT 丰富的图表组件直观呈现设备状态与作业统计信息。同时支持历史数据回溯查询,满足多场景数据追溯需求。



系统接口层面支持 HTTP 或 WebSocket 协议对接客户业务系统,实现作业任务单、设备运维记录等数据的实时拉取与推送。数据面板基于实时数据流自动更新设备运行状态、当前任务进度等关键指标,异常数据实时触发预警提示。通过整合全量作业与设备数据,为管理决策提供精准支撑,助力管理人员快速定位问题、优化作业流程,提升运营效率与决策科学性。
依托图扑 HT 引擎强大的底层技术,监控系统实现多设备兼容性,用户可通过 PC、大屏、手机、平板、VR/AR 等多种终端灵活操作,适配不同场景下的使用需求。
02 VR 远程操控
沉浸式交互
用户通过 VR 头显与操作手柄组合,可实现与行车吊操作面板的联动控制:佩戴设备后,视野将同步呈现 1:1 还原物理场景的 VR 设备模型及配套虚拟操作手柄,手柄投射的交互射线可精准响应虚拟环境操作,射线指向目标物体时自动触发预设自定义事件,实现沉浸式精准操控。
虚实同步反馈
图扑 HT 平台接收事件后转化为精准控制指令,完成行车平移、抓斗升降 / 开闭等操作;同时操作反馈实时同步至三维场景,如抓斗闭合时物料形态同步变化,确保远程操作与现场作业一致性。
多视角监控
操作员还可自由切换俯瞰料仓、近距离查看抓斗等视角,通过缩放功能清晰观察料仓物料分布与设备细节,达成“虚拟在场”式全面监控。
VR 应急演练
此外,系统支持 VR 沉浸式应急演练,操作员可通过 VR 设备模拟泄漏封堵、设备紧急停机等应急场景,在虚拟环境中反复实操提升处置熟练度,无需影响现场正常作业。
跨设备适配
技术实现上,系统选用 WebXR API 与 VR 头盔对接。WebXR 作为 WebVR 的升级版,旨在统一 VR 和 AR 标准接口,图扑 HT 通过与该 API 对接简化接入流程并封装易用接口,用户仅需简单配置即可将三维场景完美呈现在 VR 头盔中,且支持跨设备使用,无需关注具体设备型号,目前已兼容 Pico Neo3、Pico 4、Oculus Quest 2/3、HTC VIVE 等主流 VR 头盔设备。
03 料位智能监测
针对固废坑内垃圾分布状态的可视化需求,系统采用“数百个高度测点+模型生成”的方式实现精准展示,打破传统单一料位传感器的监测局限。
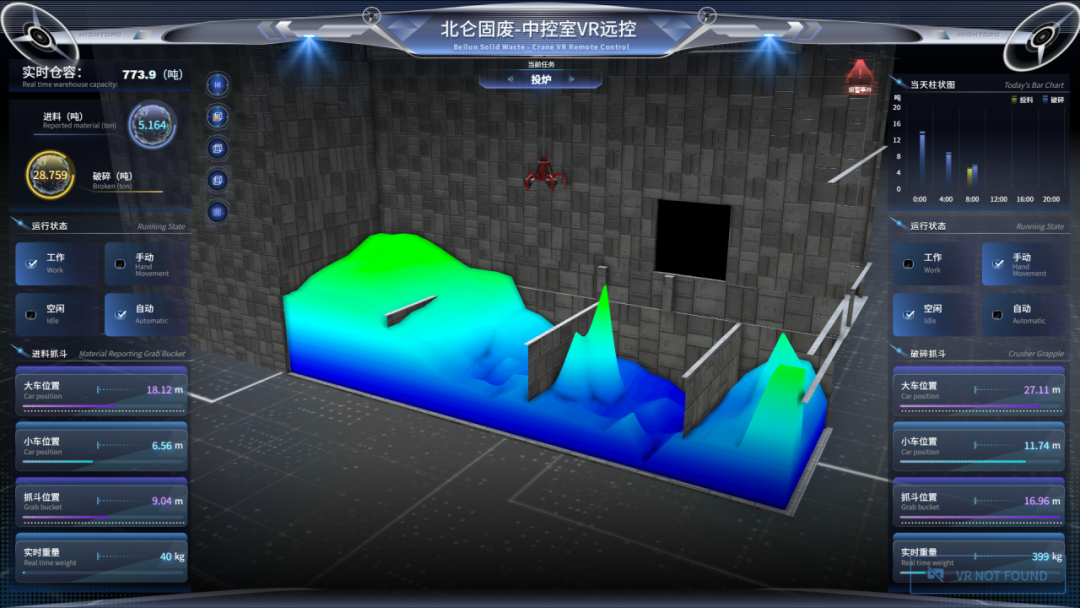
- 高密度测点采集:在固废坑区域按网格状均匀布设数百个高度测点,每个测点配备高精度超声波或雷达传感器,实时采集对应位置的垃圾堆积高度数据。
- 动态曲面生成:系统将各测点采集的高度数据实时传输至 HT 引擎,通过插值算法与曲面生成技术,构建固废坑内垃圾堆积的三维曲面模型。模型以三角面片为基本单元,根据高度数据自动调整面片起伏形态,真实还原垃圾“山丘状”“凹陷状”等复杂分布特征;同时支持按时间序列动态回放模型变化过程,直观呈现垃圾堆积的演变趋势,辅助管理人员分析作业轨迹合理性。
- 作业路径规划:通过颜色映射区分不同高度区间,快速识别高堆与低洼区域,为抓斗作业路径规划提供精准指引,避免碰撞或漏抓问题。
04 多源数据源采集与治理
多源数据接入
系统通过 WebSocket 接口与行车控制中台深度通讯,采集行车平移距离、速度等运行参数,抓斗升降高度、开闭角度等状态数据,电机温度、传感器异常等设备故障信号及料仓料位数据;同时支持从数据库、文件系统同步历史作业记录,实现“实时数据+历史数据”双维度覆盖。
数据清洗与整合
针对采集的多源异构数据,系统内置数据治理引擎,自动完成异常值过滤、格式转换与逻辑校验,例如过滤传感器跳变数据、将 PLC 二进制数据转为 JSON 格式、验证抓斗高度与料位匹配度,确保数据一致性与准确性,为后续可视化与控制提供可靠支撑。
总结
安全层面,通过 VR 远程操作规避人工直接接触危废场景,结合虚拟围栏与故障预警系统,降低设备碰撞、物料泄漏等风险,提升安全防护水平;效率层面,依托实时数据监控与自动化动画功能,减少人工巡检工作量,缩短设备故障响应时间,提升作业调度效率,实现运维全流程高效运转。HT 一体化监控方式为固废处理行业树立新标杆,推动行业运维转型并为同类设备数字化升级提供可复制经验。
关于图扑软件
图扑软件 (Hightopo) 长期专注于 Web 可视化领域,自主研发 HT for Web 2D 和 3D 图形渲染引擎、低代码数字孪生组态平台及相关工具。目前产品已广泛应用于工业组态、电力能源、孪生工厂、电信机房、智慧交通、智慧城市、园区楼宇、智慧水务、航天军工等行业领域,为客户提供可靠的一站式数字孪生解决方案。
关于南京福尔利
南京福尔利长期专注环保(固废及危废)行业重型桥式起重机智能化改造,可大幅减少操作工人重复性机械操作,实现起重机在作业区域内依据任务需求自主决策、安全稳定无人化运行。福尔利智能化行车吊方案已在全国签约实施超 100 台行车,覆盖光大环保、绿色动力、康恒环境、瀚蓝环境、中科环境、宝武环科、城发环境、沈阳新基环保、宁波北仑固废、温州固废处置等多家环保行业头部企业。